include 18f2455 -- библиотека для используемого МК
--
enable_digital_io () -- переключение всех входов на цифровой режим
--
alias Button is pin_B7 -- раз уж у нас подключена кнопка, объявим ее
pin_B7_direction = input -- кнопка у нас работает на вход
--
-- одна строчка - и у нас есть все необходимое для работы с USB CDC
include usb_serial -- бибилотека для работы с usb
--
usb_serial_init () -- --инициализируем USB CDC
forever loop -- основной цикл, выполняется постоянно
usb_serial_flush () -- обновление usb. Данная процедура выполняет все необходимые
-- действия для поддержания соединения с ПК
end loop
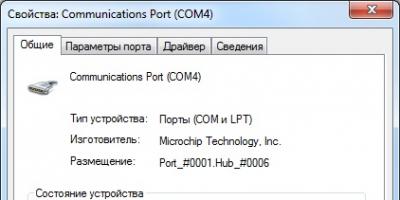
Скомпилировав данный код, записав полученный HEX файл в МК при помощи бутлоадера и запустив устройство можно будет наблюдать как в системе опрделится новое устройство: Виртуальный сom-порт.

Теперь, когда устройство уже работает, научим его общаться.
Для чтения принятого байта существует функция usb_serial_read(byte) :boolean. При наличии полученного байта она заносит его в указанную переменную и возвращает true , иначе возвращает false .
Для отправки байта существует процедура usb_serial_data . Она замаскирована под переменную, потому для отправки байта достаточно присвоить ей значение отправляемого байта.
Объявим переменную размером в байт до основного цикла, в основном цикле будем проверять наличие полученных байт, и при их наличии отправлять их обратно.
include 18f2455
--
enable_digital_io ()
--
alias Button is pin_B7
pin_B7_direction = input
--
--
include usb_serial
--
usb_serial_init ()
var byte ch -- объявляем переменную
forever loop -- основной цикл
usb_serial_flush ()
if (usb_serial_read (ch )) then -- если байт получен, он будет записан в ch
usb_serial_data = ch -- отправляем полученный байт обратно
end if
end loop
Компилируем, зажимаем кнопку, передергиваем питание, запуская бутлоадер, меняем прошивку, запускаем.
Устройство снова определилось в системе, теперь нам нужен софт, дабы протестировать работу устройства.
Пока у нас нет своего, используем готовый терминал: я использовал программу RealTerm.
Открываем порт с нужным номером и отправляем данные.

И нам в ответ приходит то, что мы отправили. Значит, все работает как надо.
Софт
Итак, наш микроконтроллер умеет принимать байты и тут же отправлять их обратно. Теперь напишем свой софт для общения с ним (я буду использовать Delphi).Создаем новый проект, раскидываем по форме необходимые компоненты:
SpinEdit1 - для указания номера порта
Button1 - для установки соединения
Button2 - для разрыва соединения
SpinEdit2 - для ввода байта в десятичном виде
Button3 - для отправки байта
Memo1 - для вывода принятой информации.
Как уже было сказано выше, с com-портом нужно работать так же, как и с обычным текстовым файлом: используя функции CreateFile, WriteFile и ReadFile.
Дабы не вдаваться в подробности, возьмем готовую библиотеку для работы с com-портом: ComPort.
Вешаем на каждую кнопку необходимую задачу и получаем конечный код:
unit Unit1;interface
Uses
Windows, Messages, SysUtils, Variants, Classes, Graphics , Controls, Forms,
Dialogs, StdCtrls, Spin,ComPort;Type
TForm1 = class (TForm)
SpinEdit1: TSpinEdit;
Button1: TButton;
Button2: TButton;
SpinEdit2: TSpinEdit;
Button3: TButton;
Memo1: TMemo;
procedure OnRead(Sender: TObject; ReadBytes: array of Byte );
procedure Button1Click(Sender: TObject);
procedure Button2Click(Sender: TObject);
procedure FormDestroy(Sender: TObject);
procedure Button3Click(Sender: TObject);
private
{ Private declarations }
Port: TComPort;
public
{ Public declarations }
end;var
Form1: TForm1;
num: integer;
implementationProcedure TForm1.Button1Click(Sender: TObject);
begin
Port:= TComPort.Create(SpinEdit1.Value, br115200); //создаем соединение
Port.OnRead:= OnRead; //создаем поток чтения принятых данных
Button2.Enabled:= true ; //активируем кнопку закрытия соединения
end;Procedure TForm1.Button2Click(Sender: TObject);
begin
Port.Free; //закрываем соединение
Button2.Enabled:= false ; //отключаем кнопку
end;Procedure TForm1.Button3Click(Sender: TObject);
begin
if Button2.Enabled then Port.Write();
end;Procedure TForm1.FormDestroy(Sender: TObject);
begin
if Button2.Enabled then
Port.Free;
end;Procedure TForm1.OnRead(Sender: TObject; ReadBytes: array of Byte );
var
i:integer;
begin
for i:= Low(ReadBytes) to High(ReadBytes) do //проходим по массиву принятых байт
begin
Memo1.Text:= Memo1.Text + "." +InttoHex(ReadBytes[i],2); //добавляем его HEX значение в окно
inc(num); //считаем колв-о принятых байт
end;
if num > 10 then begin
Memo1.Lines.Add("" ); //переносим строку
num:= 0;
end;
end;
Запускаем, устанавливаем соединение, отправляем байты:

Вот и готов наш самый простой терминал для работы с самым простым usb-устройством.
Как видно, чтение и запись происходит динамическими массивами байт.
Обрабатывая получаемую информацию можно составить необходимый протокол обмена, подходящий для текущей задачи.
include 18f2455
--
enable_digital_io ()
--
alias Button is pin_B7
pin_B7_direction = input
--
--
include usb_serial
--
usb_serial_init ()
var byte ch
var byte i -- объявляем вторую переменную
forever loop -- основной цикл
usb_serial_flush ()
if (usb_serial_read (ch )) then -- если байт получен выполняем необходимые действия
case ch of -- перебираем номер байта
0 : usb_serial_data = 0xff
1 : usb_serial_data = Button -- отправка состояния кнопки
OTHERWISE block -- если получено что-то иное
for 16 using i loop -- отправляем 10 байт с данными
usb_serial_data = ch +i -- от ch до ch+15
end loop
end block
end case
end if
end loop
Дополнительные возможности
Если на этом остановиться, получится обычная статья с подробным описанием примера использования библиотеки, коих на просторах сети достаточно. Потому добавлю немного более углубленной информации.Упрощение отправки данных
Отправлять информацию по одному байту - не всегда удобно. Очень часто может пригодиться библиотека print . Она содержит процедуры по отправке данных всевозможной длины всевозможными форматами: byte,hex,dec,bin,boolean что может упростить вывод данных в программе.>include print
...
var dword data
print_dword_hex (usb_serial_data , data )
Название всех команд можно посмотреть в файле библиотеки.
Ожидание подключения к ПК
Если перед стартом основного цикла микроконтроллера необходимо предварительно установить соединение с ПК, то можно дописать перед ним строчкиwhile (usb_cdc_line_status () == 0x00 ) loop
end loop
Привязываем к устройству номер порта
Если оставить все как есть, система при каждом новом подключении будет выделять первый свободный номер порта. А это значит что за ним придется всегда следить.Для того, что бы этого не происходило, необходимо устройству присвоить уникальное значение серийного номера до подключения библиотеки usb:
Номер может быть любой длины и содержать различные символы.
const byte USB_STRING3 =
{
24 , -- длина массива
0x03 , -- bDescriptorType
"0" , 0x00 ,
"1" , 0x00 ,
"2" , 0x00 ,
"3" , 0x00 ,
"4" , 0x00 ,
"5" , 0x00 ,
"6" , 0x00 ,
"7" , 0x00 ,
"8" , 0x00 ,
"9" , 0x00 ,
"X" , 0x00
}
Меняем имя устройства на свое
Поменять имя устройства, видимое в системе до установки драйверов можно объявив массив с именем, как и серийный номер, это необходимо сделать до подключения библиотеки USB.const byte USB_STRING2 =
{
28 , --
0x03 , -- bDescriptorType
"D" , 0x00 ,
"e" , 0x00 ,
"m" , 0x00 ,
"o" , 0x00 ,
" " , 0x00 ,
"B" , 0x00 ,
"o" , 0x00 ,
"a" , 0x00 ,
"r" , 0x00 ,
"d" , 0x00 ,
" " , 0x00 ,
"=" , 0x00 ,
")" , 0x00
}

Но увы, после установки драйверов устройство поменяет имя на указанное в.inf файле, потому поменяем имя и там
DESCRIPTION=«Demo CDC»

Организуем автоподключение устройства
Увы, никаких прямых путей выполнить данную задачу нет, потому придется исхитриться.Прежде всего необходимо присвоить своему устройству уникальное значение производителя и продукта, дабы легко определять его среди сотен других стандартных CDC-прошивок.
VID и PID выдаются за денюжку, потому пойдем по пуути китайцев: втихую возьмем себе заведомо свободные значения.
Прошивка:
В прошивке необходимо объявить две переменные до подключения библиотеки USB
const word USB_SERIAL_PRODUCT_ID = 0xFF10
const word USB_SERIAL_VENDOR_ID = 0xFF10
Вместо FF10 можно вставить любые два слова (2 байта). Конечный результат содержится в прилагаемом архиве.
Драйвера:
Так как драйвера не предназначены для нашей комбинации VID и PID, допишем наши значения в.inf файл вручную:
%DESCRIPTION%=DriverInstall, USB\VID_FF10&PID_FF10
%DESCRIPTION%=DriverInstall, USB\VID_FF10&PID_FF10
Софт:
Для отлова событий подключения\отключения устройства подключим библиотеку ComponentUSB. Не считаю нужным пояснять каждую строчку: все изменения можно увидеть в прилагаемом проекте.
Результат
На скриншоте сложно разглядеть, но кнопка отправки активна только в момент наличия подключенного устройства, при этом каждые 50мс программа подает запрос на получение состояния кнопки (что, впрочем, неправильно, потому как нажатие кнопки должно обрабатываться на МК).
Как видно, организовать обмен данными между МК и ПК через USB - не самое сложное занятие. Полученное соединение можно использовать не только для конечынх целей: оно так же подходит для отладки программы. Ведь отправить на компьютер результаты расчетов, текущие состояния регистров и переменных куда нагляднее, чем моргать парой светодиодов азбукой морзе.
И напоследок: советую заглянуть в исходный код лампы настроения. Там можно найти довольно-таки хороший вариант обработки принимаемых данных для организации удобного протокола обмена.

рис.1 Иллюстрация работы Android устройства в режимах USB Host и Accessory (рисунок с сайта http://developer.android.com)
Отметим, что использование USB - не единственный способ связи с тем же самодельным устройством. Android позволяет использовать еще , NFC, Wi-Fi P2P, SIP, а также стандартное сетевое подключение . Так что в арсенале разработчика достаточно возможностей для осуществления своих самых смелых замыслов.
Другим распространенным вариантом связи с различными устройствами до сих пор является использование переходника USB-COM. Материал в сети по применению переходника USB-COM в Android есть - см., например, . Популярность такого подключения обусловлена наличием большого количества уже разработанных с использованием различных микроконтроллеров устройств, связь с которыми осуществляется с помощью COM-порта (последовательного порта), что лет 10 назад являлось почти стандартным способом передать данные от компьютера к самодельной «железке».
В сравнении с COM-портом, использование USB позволяет существенно повысить скорость передачи данных и сделать этот процесс удобным для пользователя. Cкорость передачи, которая даже в случае низкоскоростных устройств (клавиатуры, мыши, джойстики), составляет 10-1500 Кбит/c, простота и невысокая стоимость кабельной системы и подключений, самоидентификация устройств с автоматическим конфигурированием, скрытие подробностей электрического подключения от конечного пользователя (плюс возможность отключения кабеля без выключения устройств), контроль ошибок и их восстановление на уровне протокола - вот неоспоримые преимущества данной технологии (см. , с.12).
Вообще, говоря об использовании USB для передачи данных, нелишним будет упомянуть книгу П.Агурова «Интерфейс USB» . Она, хотя часто критикуется в сети и выпущена последний раз в 2006 году, не раз помогла найти верное решение при поиске информации по различным аспектам применения этой технологии. В книге рассмотрены вопросы: от выбора микросхемы и схемотехники для контроллера до написания программы микроконтроллера и примеров программирования передачи данных по протоколу USB со стороны компьютера. Нельзя не указать и "первоисточник" данных по этому вопросу - сайт некоммерческой организации USB IF (USB Implementers Forum), занимающейся разработкой спецификаций этого интерфейса - , правда данный материал на английском языке. Однако именно там вы найдете исчерпывающие сведения об устройстве интерфейса USB. Есть неплохой перевод частей спецификации - . Интересующимся программными решениями со стороны микроконтроллера также можно посмотреть ссылку .
Данная статья адресована прежде всего тем, у кого есть какое-либо электронное устройство (разработанное самостоятельно или кем-то еще), протокол обмена данными с которым хорошо известен (например, уже есть программа, работающая с этим устройством в Windows/Linux) и хотелось бы иметь программу, работающую с ним в Android.
Немного о классах USB-устройств
Необходимо отметить, что разработка программного обеспечения для обмена данными с конкретным устройством сильно зависит от его реализации на уровне микроконтроллера. Привести примеры программ связи для всех типов USB-устройств в рамках одной статьи, по понятным причинам, невозможно (начальные сведения о программировании различных типов устройств можно почерпнуть в ). Однако, мы ограничимся тем, что приведем код, реализующий поиск устройства и доступ к его контрольным точкам для обмена информацией. Также разберем отправку данных на примере одного из типов USB-устройств, а именно, класса устройств HID (human interface device - класс устройств для взаимодействия с человеком). Этот класс включает в себя «медленные» устройства, такие как клавиатура, мышь, джойстик и примеров его реализации с помощью различных микроконтроллеров в сети достаточно (есть, например, и в ).
Почему именно класс HID так полюбился изготовителям различных самодельных устройств? Процитируем Википедию : «Помимо детальных спецификаций классических устройств ввода (типа клавиатур и мышек) стандарт HID определяет особый класс устройств без детальных спецификаций. Этот класс именуется USB HID Consumer Control и представляет собой по сути нерегламентированный канал связи с устройством. При этом устройство пользуется теми же стандартными для операционной системы драйверами что и мышка с клавиатурой. Таким образом, можно создать USB устройство которое не требует создания и инсталляции специальных драйверов в большинстве распространенных компьютерных операционных систем». Остается добавить только, что работает эта спецификация и в ОС Android (не исключая прошивок CyanogenMod).
Одним из вариантов обмена данными с HID-устройством является передача по прерываниям (interrupt transfer), которая используется в том случае, когда необходимо передать пакеты данных небольшого размера (максимальный размер пакета зависит от скорости передачи и составляет от 64 до 1024 байт) через заданный временной интервал. Пакет для передачи называется репортом (англ. - report, см. с.71, 95). Такой длины репорта обычно вполне хватает для обмена информацией с самодельным устройством, 64 байта информации в одном пакете, например, - это довольно много для контроллера, ведь для передачи состояний светодиода или простейшего датчика достаточно 1 бита информации.
Необходимые инструменты
Итак, нам понадобятся - планшет или телефон с Android версии не ниже 3.1. Здесь необходимо отметить, что вышеуказанный USB Host API полностью реализован не на всех мобильных устройствах (об этом упоминается и на сайте developer.android.com, см. ссылку ). В некоторых планшетах/телефонах разъем USB используется только для зарядки и связи с персональным компьютером. Еще раз отправлю читателя к списку мобильных устройств, пригодных или непригодных для наших опытов (см. ).
Понадобится также какое-либо USB-устройство (для первых опытов будет достаточно обычного USB-флеш-накопителя), переходник OTG (On-The-Go - см. рис. 2) и/или шнур USB для связи с устройством. В Википедии по поводу OTG говорится: «При подключении через USB OTG ранг устройства (ведущий или ведомый) определяется наличием или отсутствием перемычки между контактами 4 и 5 в штекере соединительного кабеля. В USB OTG кабеле такая перемычка устанавливается лишь в одном из двух разъемов (см. ).» Соответственно, нам необходима такая перемычка со стороны мобильного устройства.

Рис.2 Различия в схеме обычного USB-кабеля и OTG-кабеля (рисунок с сайта http://tech.firstpost.com)
Такой OTG-кабель для Вашего устройства можно спаять и самостоятельно. Для этого необходимо купить в радиомагазине подходящий разъем, плюс автор, например, использовал старый кабель от переносного жесткого диска:
Неплохим подспорьем в работе будет также программа USB Device Info, установленная из хранилища Google Play Market. Программа умеет определять подключенные к USB-разъему планшета/телефона устройства как с помощью Java API так и с помощью ядра Linux. То есть, если Ваше устройство не определилось с помощью Java USB Host API в USB Device Info, то, с большой вероятностью, тщетно будет использовать для этого мобильного устройства какую-либо (в том числе и свою) Android-программу, написанную с помощью Java и USB Host API.
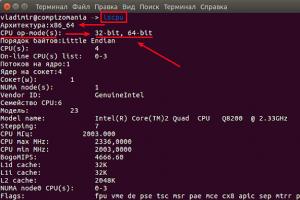
Иногда, также, очень полезной бывает информация, выводимая командой lsusb операционной системы Linux. С ключами -v и -d lsusb выводит о USB-устройстве все, или почти все, что необходимо разработчику программного обеспечения для устройств этого класса (см. рис.3).

Рис.3 Пример вывода команд lsusb и lsusb -v -d
Далее, необходим компьютер с установленным Android SDK и интегрированной средой разработки (IDE) Eclipse с плагином ADT (хотя можно обойтись и только SDK). Как создать и установить приложение для Android можно посмотреть, например, в , или в сети Интернет.
Ну и, конечно, необходимо хотя бы а также желание добиться результата, без него никак! Отмечу, что на выяснение некоторых технических вопросов применения USB в Android автором, потребовались недели кропотливого поиска информации.
Классы Java для работы с USB в Android API
Итак, как говорится на сайте разработчиков USB Host API для Android (см. ) - «прежде чем начать, важно понять какие классы вы будете использовать в работе». В таблице 1 приведено описание важнейших классов для работы с USB Host API (попытка перевода информации с http://developer.android.com).
Таблица 1. Описание классов для работы с USB в Android
| Название класса | Описание |
|---|---|
| UsbManager | Allows you to enumerate and communicate with connected USB devices. Позволяет определять подключенное USB-устройство и обмениваться с ним данными. |
| UsbDevice | Represents a connected USB device and contains methods to access its identifying information, interfaces, and endpoints. Представляет подключенное USB-устройство и содержит методы для доступа к его идентификационной информации, интерфейсам, и конечным точкам. |
| UsbInterface | Represents an interface of a USB device, which defines a set of functionality for the device. A device can have one or more interfaces on which to communicate on. Представляет «интерфейс» USB-устройства, который определяет набор функций для данного устройства. Одно устройство может иметь один или несколько интерфейсов для обмена информацией. |
| UsbEndpoint | Represents an interface endpoint, which is a communication channel for this interface. An interface can have one or more endpoints, and usually has input and output endpoints for two-way communication with the device. Представляет «конечную точку» интерфейса, которая и является каналом связи для этого интерфейса. Интерфейс может иметь одну и более конечных точек, и обычно имеет конечные точки для получения информации и для ее передачи. |
| UsbDeviceConnection | Represents a connection to the device, which transfers data on endpoints. This class allows you to send data back and forth sychronously or asynchronously. Представляет «подключение» к данному устройству. Необходимо для передачи данных в конечную точку. Этот класс позволяет получать данные или передавать синхронно или асинхронно. |
| UsbRequest | Represents an asynchronous request to communicate with a device through a UsbDeviceConnection. Представляет асинхронный запрос на обмен данными с устройством через UsbDeviceConnection. |
| UsbConstants | Defines USB constants that correspond to definitions in linux/usb/ch9.h of the Linux kernel.. Определяет константы, которые соответствуют определениям в linux/usb/ch9.h ядра Linux. |
Практически во всех случаях применения USB Host API программист использует эти классы в своей работе. Алгоритм их применения выглядит примерно так: определяем устройства (цель - программный доступ к классу UsbDevice), подключенные к хосту (мобильному устройству), с помощью UsbManager. Когда программный доступ устройству получен, необходимо определить соответствующие UsbInterface и UsbEndpoint для общения с ним. Как только вы получили в свое распоряжение конечную точку, откройте UsbDeviceConnection, чтобы общаться с USB-устройством. Если конечная точка работает в режиме асинхронной передачи, используем класс UsbRequest.
Давайте попробуем со всем этим разобраться создав простое приложение, которое, используя этот API, определит подключенное к хосту с ОС Android устройство и выведет о нем некоторую информацию на экран телефона или планшета.
Создаем проект
В Eclipse проект создается с помощью пунктов меню File->New->Android Application Project. Заметим также, что код, приведенный ниже заимствован из приложений-примеров, поставляемых с Android SDK (папка android sdk samples/android-N(API Level)/USB) речь идет о программе управления USB-игрушкой Missile Launcher (см. рис. 4) Примеры приложений загружаются через Android SDK Manager (нужно отметить пункт - Samples for SDK ). В листингах, приведенных ниже, примеры кода снабжены комментариями, которые объясняют суть происходяшего.

Рис.4 Забавная игрушка "Ракетозапускалка"
Создавая проект не забудьте отметить нужный API Level в опции Minimum Requared SDK (API Level 12, соответствующий версии Android 3.1 /Honeycomb/, или выше). В проекте будет очень простой интерфейс пользователя - главное окно (Activity) и TextView для вывода информации. Подобный проект подробно рассмотрен в .
В созданном автоматически классе для Activity нашего проекта необходимо определить следующие экземпляры классов для работы с USB:
private
TextView lgView;
private
UsbManager mUsbManager;
private
UsbDevice mDevice;
private
UsbDeviceConnection mConnection;
private
UsbEndpoint mEndpointIntr;
LgView = (TextView) findViewById(R.id .logTextView ) ;
и получаем доступ к классу UsbManager
MUsbManager = (UsbManager) getSystemService(Context .USB_SERVICE ) ;
Создадим еще обработчик события onResume(). Добьемся цели - чтобы информация о подключенных устройствах обновлялась при активизации окна нашего приложения (см. Листинг 1).
Листинг 1. Обработчик события onResume()
public
void
onResume()
{
super
.onResume
()
;
//заполняем контейнер списком устройств
HashMap<
String
, UsbDevice>
deviceList =
mUsbManager.getDeviceList
()
;
Iterator<
UsbDevice>
deviceIterator =
deviceList.values
()
.iterator
()
;
lgView.setText ( "Devices Count:" + deviceList.size () ) ;
while
(deviceIterator.hasNext
()
)
{
UsbDevice device =
(UsbDevice)
deviceIterator.next
()
;
//пример определения ProductID устройства
\n
"
+
"Device ProductID: "
+
device.getProductId
()
)
;
}
//определяем намерение, описанное в фильтре
// намерений AndroidManifest.xml
Intent intent =
getIntent()
;
lgView.setText
( lgView.getText
()
+
"\n
"
+
"intent: "
+
intent)
;
String
action =
intent.getAction
()
;
//если устройство подключено, передаем ссылку в
//в функцию setDevice()
UsbDevice device =
(UsbDevice)
intent.getParcelableExtra
(UsbManager.EXTRA_DEVICE
)
;
if
(UsbManager.ACTION_USB_DEVICE_ATTACHED
.equals
(action)
)
{
setDevice(device)
;
lgView.setText
( lgView.getText
()
+
"\n
"
+
"UsbManager.ACTION_USB_DEVICE_ATTACHED.equals(action) is TRUE"
)
;
}
else
if
(UsbManager.ACTION_USB_DEVICE_DETACHED
.equals
(action)
)
{
if
(mDevice !=
null
&&
mDevice.equals
(device)
)
{
setDevice(null
)
;
lgView.setText
( lgView.getText
()
+
"\n
"
+
"UsbManager.ACTION_USB_DEVICE_DETACHED.equals(action) is TRUE"
)
;
}
}
Далее, для Activity создадим функцию setDevice(), необходимую для работы с нашим устройством (см. Листинг 2). В обработчике onResume() и в функции setDevice() мы в точности выполнили алгоритм применения USB Host API, описанный в предыдущем разделе.
Листинг 2. Функция setDevice()
private
void
setDevice(UsbDevice device)
{
lgView.setText
( lgView.getText
()
+
"\n
"
+
"setDevice "
+
device)
;
//определяем доступные интерфейсы устройства
if
(device.getInterfaceCount
()
!=
1
)
{
LgView.setText
( lgView.getText
()
+
"\n
"
+
"could not find interface"
)
;
return
;
}
UsbInterface intf =
device.getInterface
(0
)
;
//определяем конечные точки устройства
if
(intf.getEndpointCount
()
==
0
)
{
LgView.setText
( lgView.getText
()
+
"\n
"
+
"could not find endpoint"
)
;
return
;
}
else
{
lgView.setText
( lgView.getText
()
+
"\n
"
+
"Endpoints Count: "
+
intf.getEndpointCount
()
)
;
}
UsbEndpoint epIN =
null
;
UsbEndpoint epOUT =
null
;
//ищем конечные точки для передачи по прерываниям
for
(int
i =
0
;
i <
intf.getEndpointCount
()
;
i++
)
{
if
(intf.getEndpoint
(i)
.getType
()
==
UsbConstants.USB_ENDPOINT_XFER_INT
)
{
if
(intf.getEndpoint
(i)
.getDirection
()
==
UsbConstants.USB_DIR_IN
)
{
epIN =
intf.getEndpoint
(i)
;
lgView.setText
( lgView.getText
()
+
"\n
"
+
"IN endpoint: "
+
intf.getEndpoint
(i)
)
;
}
else
{
epOUT =
intf.getEndpoint
(i)
;
lgView.setText
( lgView.getText
()
+
"\n
"
+
"OUT endpoint: "
+
intf.getEndpoint
(i)
)
;
}
}
else
{
lgView.setText
( lgView.getText
()
+
"\n
"
+
"no endpoints for INTERRUPT_TRANSFER"
)
;
}
}
MDevice =
device;
mEndpointIntr =
epOUT;
//открываем устройство для передачи данных
if
(device !=
null
)
{
UsbDeviceConnection connection =
mUsbManager.openDevice
(device)
;
if
(connection !=
null
&&
connection.claimInterface
(intf, true
)
)
{
LgView.setText
( lgView.getText
()
+
"\n
"
+
"open device SUCCESS!"
)
;
mConnection =
connection;
} else {
LgView.setText
( lgView.getText
()
+
"\n
"
+
"open device FAIL!"
)
;
mConnection =
null
;
}
}
}
}
В дополнение к приведенному коду, который, как уже наверняка догадался внимательный читатель, открывает устройство для приема-передачи данных, остается лишь задействовать протокол обмена данными, который, повторюсь, должен быть хорошо известен разработчику. Приведем лишь, как было обещано, код, который отправит HID устройству некоторый пакет данных message используя передачу по прерываниям, класс UsbRequest и соответствующую конечную точку - см. Листинг 3.
Листинг 3. Пример кода для отправки данных устройству
//определение размера буфера для отправки
//исходя из максимального размера пакета
int
bufferDataLength =
mEndpointIntr.getMaxPacketSize
()
;
lgView.setText ( lgView.getText () + "\n " + mEndpointIntr.getMaxPacketSize () ) ;
ByteBuffer buffer = ByteBuffer.allocate (bufferDataLength + 1 ) ;
UsbRequest request = new UsbRequest() ;
buffer.put (message) ;
request.initialize (mConnection, mEndpointIntr) ;
request.queue (buffer, bufferDataLength) ;
if (request.equals (mConnection.requestWait () ) )
//отправка прошла успешно
//lgView.setText(lgView.getText() + "\n" + "sending CLEAR!!!");
catch (Exception ex)
//что-то не так...
//lgView.setText(lgView.getText() + "\n" + "sending not clear...");
Фильтрация устройств в AndroidManifest.xml
Хотя в нашем приложении нет нужды в поиске конкретного устройства с известными VID (Vendor-ID) и PID (Product-ID), инженеры Google не приводят примеров приложений без секции intent-filter в манифест файле, и автору не удалось добиться работы программы без фильтрации устройств в AndroidManifest.xml .
Напомню, что Vendor-ID и Product-ID это уникальные идентификаторы USB-устройств. То есть, используя фильтрацию, можно создать приложение, которое взаимодействует лишь с определенным устройством или каким-то классом устройств. Отметим, что производители устройств должны согласовать эти номера с организацией USB IF.
Приложение, манифест файл которого приведен в листинге 4, а файл с условием фильтрации в листинге 5, например, с успехом распознает подключенные к мобильному устройству USB-флеш-накопители, но не распознает клавиатуру и мыши, имеющиеся у автора. Это приложение вместе с исходным кодом можно скачать по ссылке .
Листинг 4. Файл AndroidManifest.xml
>
package="ru.learn2prog.usbhostexample"
android:versionCode="1"
android:versionName="1.0" >
android:minSdkVersion
="12"
android:targetSdkVersion
="14"
/>
android:allowBackup
="true"
android:icon
="@drawable/ic_launcher"
android:label
="@string/app_name"
android:theme
="@style/AppTheme"
>
android:name
="ru.learn2prog.usbhostexample.MainActivity"
android:label
="@string/app_name"
>
>
android:resource
="@xml/device_filter"
/>
>
>
>
Листинг 5. Файл фильтра device_filter.xml (каталог /res/xml)
Операции по сборке и установке нашего приложения ничем не отличаются от обычных (см. примеры в , ). Хочу обратить внимание на действия фильтра намерений - при подключении устройства к хосту ОС запрашивает пользователя о запуске нашего приложения.
Литература/Ссылки:
11.
12.
13. http://developer.android.com/guide/topics/connectivity/usb/host.html - обзор классов, необходимых для работы с USB в Android
14. ссылка на исходники приложения
Рисунок 1
Интерфейс USB приобретает все большую популярность как интерфейс связи периферийных устройств с ПК и современные компьютеры зачастую не имеют привычного интерфейса RS-232. Популярность USB обусловлена многими причинами, вот основные из них:
- высокая скорость обмена, высокая помехозащищенность
- управление потоком данных, контроль целостности и исправление ошибок
- возможность разветвления через хабы и подключения большого количества устройств.
- возможность получения питания от шины
- универсальность шины - возможность подключения разноплановых устройств (клавиатура, принтер, модем)
- автоматическая идентификация и конфигурирование системы, Plug and Play
Однако существуют (зачастую необоснованные) факторы, сдерживающие массовое использование USB разработчиками микроконтроллерных приборов:
- необходимость программирования драйверов для Windows
- сравнительно малая распространенность микроконтроллеров со встроенным интерфейсом USB
- Урок 2. Создание USB 2.0 совместимого HID-устройства типа джойстик.
Этот цикл статей призван показать, что преодолеть эти трудности довольно легко и каждый может провести "апгрейд" своего устройства с привычного RS-232 на USB или создать новое устройство с USB интерфейсом.
В качестве микроконтроллера в примерах будет рассматриваться микроконтроллер производства компании Microchip
Урок 1. USB без программирования Windows, виртуальный COM порт
Одна из задач, возникающих при разработке USB устройств, это переход с интерфейса RS-232 на USB, при этом, если производится модификация "старого" прибора или устройство должно быть совместимо с существующими протоколами и программным обеспечением ПК, то желательно избавиться от любой модификации программного обеспечения на компьютере. Одним из решений данной задачи является использование интерфейса USB в качестве виртуального COM-порта. Применение данного метода исключает необходимость модификации ПО компьютера, т.к. USB соединение видится персональным компьютером как дополнительный COM-порт. Другое важное преимущество заключается в том, что используются стандартные драйвера Windows и не требуется создание какого-либо своего драйвера.
Спецификация USB описывает класс коммуникационных устройств (Communication Device Class - CDC), который определяет множество режимов соединений для телекоммуникационных (модемы, терминалы, телефоны) и сетевых устройств (Ethernet адаптеры и хабы, ADSL модемы), включая эмуляцию последовательного порта.
Возьмем в качестве примера устройство, которое через RS-232 передает данные о напряжении с потенциометра и температуре с цифрового датчика TC77, а так же принимает команды для включения/выключения двух светодиодов (данный пример для простоты реализуем на плате PICDEM™ FS USB DEMONSTRATION BOARD, но можно собрать и более простую схему - см.ниже).
Отладочная плата PICDEM FS-USB предназначена для разработок и демонстрации устройств на микроконтроллере PIC18F4550 с шиной USB2.0. На плате установлен контроллер PIC18F4550 в корпусе TQFP44, имеющий следующие особенности:
- Максимальная частота работы - 48 МГц (12 MIPS);
- 32 Кб Flash памяти программ (технология Enhanced Flash);
- 2 Кб памяти данных (из них 1 Кб двухпортового ОЗУ);
- 256 байт памяти данных EEPROM;
- Интерфейс FS USB2.0 с поддержкой скорости работы 12 Мбит/с, со встроенным приемопередатчиком и стабилизатором напряжения.
На плате установлены:
- Кварц 20 МГц;
- Интерфейс RS-232 для демонстрации возможности перехода с USART на USB;
- Разъем для внутрисхемного программирования и отладки
- Стабилизатор питающего напряжения с возможностью переключения на питание от шины USB;
- Разъем расширения PICtail™;
- Температурный датчик TC77, подключенный по I2C;
- Переменный резистор, подключенный ко входу АЦП;
- Светодиоды, кнопки.
Для данного устройства есть программа для ПК для управления устройством и индикации значений напряжения и температуры. Итак, мы можем подключить устройство к RS-232, выбрать доступный в системе COM-порт и установить скорость обмена с нашим устройством, число бит данных, количество стоповых бит, а так же параметры битов четности и управления потоком в соответствии с программой микроконтроллера (для этого мы должны знать параметры инициализации нашего контроллера)

Рис. 2
Приступим к подключению нашего устройства к USB.
Компания Microchip Technology Inc. Предлагает готовый пример применения
После начальной инициализации контроллера программа может общаться с ПК через интерфейс USB посредством нескольких готовых функций:
Модифицируем нашу программу для передачи и приема данных через USB.
Фрагмент программы подготовки и передачи данных:
Прием данных:
| if(getsUSBUSART(input_buffer,1)) { switch (input_buffer) { case "1" : mLED_3_On(); break; case "2" : mLED_3_Off(); break; case "3" : mLED_4_On(); break; case "4" : mLED_4_Off(); break; default: break; } } |
После подключения устройства к USB система опознает новое устройство

Рис. 3
И устанавливает новое оборудование

Рис. 4
Выбираем установку с указанного места и указываем путь расположения файла mcpusb.inf из комплекта исходных кодов программы к AN956. После этого производится установка нового устройства в систему.

Рис. 5
Итак, новое устройство готово к работе. В системе появился новый виртуальный COM порт.

Рис. 6
Теперь в нашей программе мы можем выбрать появившийся виртуальный COM порт для общения с устройством …

Рис. 7
… и посмотреть что устройство действительно стало работать через появившийся в системе COM порт посредством USB соединения.
Следует заметить, что USB обеспечивает контроль и исправление данных, поэтому такие понятия как скорость потока, биты четности и контроля потока становятся абстрактными понятиями, и в нашем случае их можно выбирать любыми, единственный информационный параметр это номер виртуального COM порта.
Окно программы PICDEM CDC

Рис. 8
При использовании микроконтроллеров PIC18Fxx5x со встроенным модулем USB 2.0 виртуальный COM порт может обеспечить скорость передачи данных до 80Кбайт в секунду (640Кбит/сек), что существенно превышает возможную скорость передачи через RS-232, при этом, как мы видим, переделки ПО для компьютера не потребовалось!
Примеры программ, документация и схема, использованные в уроке 1.
- Программа PICDEM CDC + исходные коды для Delphi загрузить
- Компонент Delphi для работы с COM портом загрузить
- AN956 +
оригинальные исходные коды - Файл
user_uart.c (все изменения оригинальной программы из AN956 производились только в этом файле. Для запуска примера к урок 1, необходимо скопировать этот файл в каталог C:\MCHPFSUSB\fw\Cdc\user\, заменить в проекте файл user.c на user_uart.c, скомпилировать проект и прошить микроконтроллер) - Упрощенная схема USB устройства
- Файл

Рис. 9
Примечание: в оригинальной схеме платы PICDEM FS USB используется автоматическое определение источника питания платы (внешний источник или USB). Поэтому при использовании упрощенной схемы необходимо закоментарить строку #define USE_USB_BUSSENSE_IO в файле usbcfg.h
Урок 2. Создание USB 2.0 совместимого HID-устройства типа джойстик
Наиболее распространенными USB устройствами являются устройства интерфейса с человеком (HID - Human Interface Devices). Типичными представителями этого класса являются USB- клавиатуры, мыши, джойстики, панели настройки мониторов, считыватели штрих-кодов, карт-ридеры и т.п. Преимуществами HID устройств является:
- простота реализации;
- компактный код;
- поддержка Windows (не нужны дополнительные драйвера).
На сайте компании Microchip есть пример реализации HID манипулятора мышь. Рассмотрим реализацию простейшего игрового манипулятора на основе этого примера. Для этого проекта будем использовать демонстрационную плату PICDEM FS-USB (DM163025). Отладочная плата PICDEM FS-USB имеет один переменный резистор и 2 кнопки, поэтому разрабатываемый джойстик будет иметь минимум элементов управления (2 кнопки и, например, регулятор газа).
В первую очередь нам нужно переписать дескриптор устройства под создаваемый джойстик. Для упрощения задачи можно воспользоваться программой HID Descriptor Tool, которую можно скачать с сайта
В комплекте с программой предоставляются примеры конфигураций некоторых HID-устройств, которые можно корректировать под свою задачу или создавать собственное HID устройство.

Рис. 10
Итак, в нашем случае будут использоваться несколько типов данных - это симуляция органа управления - Simulation Controls, а конкретно это ручка (педаль) газа (Throttle) и кнопки управления (Button). Для того чтобы операционная система "знала" как обращаться с этими типами данных, необходимо описать максимальные и минимальные значения и размер данных. В нашем случае "газ" это одно 8-и битное значение (report_size = 8, report_count = 1), а состояние кнопок определяется как поле однобитных значений. В примере используется только 2 кнопки, но необходимо выровнять поле до байтовой величины (report_size = 1, report_count = 8). Итого микроконтроллер при запросе данных от компьютера должен передать 2 байта - уровень газа и состояние кнопок в соответствии с сформированным дескриптором устройства (подробное описание возможных дескрипторов см. в спецификации на устройства HID
Дополнительно нужно скорректировать в описании HID Class-Specific Descriptor размер полученного дескриптора устройства и в дескрипторе конечной точки изменить размер данных, передаваемых через конечную точку (в нашем случае передаем 2 байта, поэтому размер HID_INT_IN_EP_SIZE=2).
Перечисленных изменений хватит для того чтобы Windows опознала подключенное устройство как джойстик. Теперь можем скорректировать строковые данные, чтобы устройство имело то название, какое мы хотим (например "PIC18F4550 Joystick"). Для того чтобы присвоить устройству имя на русском языке необходимо прописывать строковый дескриптор в кодировке UNICODE. На этом описание джойстика заканчивается и нужно подготовить данные для передачи в PC.
| ReadPOT(); // запуск измерения напряжения потенциометра buffer = ADRESH; // обработка состояний кнопок if(sw2==0) buffer |= 0x01; else buffer &= ~0x01; if(sw3==0) buffer |= 0x02; else buffer &= ~0x02; // передача данных Emulate_Joystick(); |
После компиляции проекта и программирования микроконтроллера можно подключить устройство к USB-порту. Плата определяется как HID игровое устройство, инсталлируется в систему и готово к работе.

Рис. 11
Через панель управления в Windows мы можем открыть доступные игровые устройства, выбрать наш джойстик, откалибровать его и проверить функциональность.

Рис. 12
При изменении конфигурации устройства - добавлении органов управления или кнопок, необходимо не только изменить описание дескриптора устройства, но и передавать данные строго в соответствии с созданным дескриптором. Так изменив в описании дескриптора устройства USAGE_MAXIMUM (BUTTON 2) максимальное число кнопок с 2 на 8, получим джойстик на 8 кнопок.

Рис. 13
При усложнении дескриптора можем получить и более полную реализацию джойстика, при этом нужно не забыть изменять следующие параметры: размер дескриптора, размер конечной точки и необходимо оправлять столько информационных данных, сколько объявлено в дескрипторе.

Рис. 14
Примеры программ, документация и схема, использованные в уроке 2.
Оригинальные исходные коды реализации HID-мыши. Исходные коды реализации HID-джойстика.
Урок 3. Составное USB устройство
Любое USB устройство может иметь несколько конфигураций и в каждой конфигурации несколько интерфейсов. Это свойство USB позволяет создаваемому устройству иметь возможность опознаваться компьютером как несколько USB устройств с разными интерфейсами. Мышка, например, может иметь встроенный карт-ридер и взаимодействовать с компьютером как два независимых устройства.
Структура дескриптора устройства:

Рис. 15
На основе стандартного примера мышки и созданного джойстика создадим составное USB устройство, которое будет определяться компьютером как два независимых HID устройства.
1. Создание дескриптора.
Изменим структуру дескриптора (файл usbdsc.h)
Устройство будет иметь 2 интерфейса, в каждом по одной конечной точке.
| #define CFG01 rom struct \ { USB_CFG_DSC cd01; \ USB_INTF_DSC i00a00; \ USB_HID_DSC hid_i00a00; \ USB_EP_DSC ep01i_i00a00; \ USB_INTF_DSC i01a00; \ USB_HID_DSC hid_i01a00; \ USB_EP_DSC ep02i_i01a00; \ } cfg01 |
- В соответствии с измененной структурой нужно изменить дескриптор в файле usbdsc.c.
- В файле usbcfg.h определить идентификаторы интерфейсов, используемые конечные точки, размеры report дескрипторов.
- В файле hid.c нужно инициализировать дополнительные конечные точки (в функции HIDInitEP) и изменить функцию обработки HID-запросов (функция USBCheckHIDRequest).
- Каждое из устройств, мышка и джойстик, должны передавать данные каждый в свою конечную точку. Поэтому нам необходимо добавить функции передачи данных в конкретные конечные точки и проверки, что нужная конечная точка свободна (добавить функции аналогичные mHIDTxIsBusy и HIDTxReport в файле hid.c).
Тогда передача данных для мышки будет выглядеть как
После компиляции проекта, прошивки контроллера и подключению устройства к USB, компьютером будут обнаружено новое составное устройство и добавлены мышка и джойстик.

Рис. 16

Рис. 17
Замечание. Не забывайте менять PID при создании нового устройства или удалять из системы предыдущее устройство с тем же самым PID.
Урок 4. Опыты с программатором PICkit2
Компания Microchip Technology Inc. выпускает недорогой программатор разработчика

Рис. 18
CDC-устройство на основе PICkit2
Используя все эти особенности, на основе программатора PICkit2 возможно создание и отладка своего USB-устройства с возможностью в любой момент откатиться назад к его функциям программатора. С помощью бутлоадера, который прошит в программатор, в PICkit2 можно прошить другие программы, например, программу поддержки виртуального COM-порта. Для этого берем пример CDC, переименовываем проект и делаем следующее
- в файле main.c меняем адрес расположения прошивки (бутлоадер PICkit2 передает управление пользовательской программе на адрес 0х002000.
#pragma code _RESET_INTERRUPT_VECTOR = 0x002000 - в файле io_cfg.h убираем все про порт D (можно задать мигание светодиода на PORTC0).
Так как PICKIT2 всегда питается от USB, то задаем
#define usb_bus_sense 1 // device is always plugged in #define self_power 0 // device is powered from USB
- в файле usbcfg.h ставим комментарии на 2 строки
//#define USE_SELF_POWER_SENSE_IO //#define USE_USB_BUS_SENSE_IO - В файле user.c выводим в USB нужные нам данные
- подключаем файл линкера pickit2.lkr
После этого можно откомпилировать проект и через оболочку PICkit2 загрузить новую прошивку.
После перепрограммирования PICkit2, компьютер определяет появление нового COM-порта, и через гипертерминал можем увидеть, что PICkit2 отсылает данные через виртуальный COM-порт.
Исходные коды данного примера доступны по
На основе данного примера и используя внешние выводы программатора PICkit2 можно получать данные с внешних устройств и передавать в компьютер через USB. Таким образом, используя PICkit2 можно сделать вывод данных на COG ЖК-индикаторы, считыватели I2C, SPI и 1-wire устройств, например датчиков температуры и др. устройств.
Радио HID клавиатура на основе PICkit2

Рис. 19
Рассмотрим еще один пример "нецелевого" использования программатора PICkit2 - эмулятор клавиатуры с радиоинтерфейсом. Такое устройство может использоваться, например, для проведения презентаций - для перелистывания слайдов вдали от компьютера.
Для реализации такого устройства нам понадобятся:
- PICkit2
- демо-плата из комплекта PICkit2 (DV164120)
- радиоприемник (rfRXD0420) и радиопередатчик (rfPIC12F675) из комплекта rfPICkit.
К демо-плате подключаем радиоприемник. Микроконтроллер на плате будет принимать данные с приемника, обрабатывать их и, при определении нажатия одной из двух кнопок на радиобрелке, выставлять уровень лог.1 на одном из 2-х выводов подключенных к PICkit2.
PICkit2 будет выполнять следующие функции:
- при подключении к компьютеру через USB определяться как HID-клавиатура
- формировать напряжение питания +5В для демо-платы с приемником
- опрашивать 2 внешних вывода контроллера приемника и при наличии лог. 1 отсылать в компьютер коды нажатия кнопок PageUp или PageDown.
Два виртуальнык COM-порта (Эмуляция микросхемы FTDI2232) на базе PICKit2
Этот пример предназначен только для изучения работы USB. Изучите требование лицензии на драйвер FTDI перед использованием!
Пример показывает как на базе микроконтроллера с USB портом сделать 2 виртуальных COM-порта.Для начало нужно установить драйвера для микросхемы FTDI2232. Затем для загрузки в PICkit2 нужно в оболочке PICkit2 выбрать пункт обновления прошивки и указать на файл TestVCP2.hex из
Пример взят с сайта
Для обратного восстановления PICkit2 как программатора нужно отключить PICkit2 от USB и при нажатой кнопке снова подключить кабель USB, после чего выбрать загрузку штатной прошивки программатора.
Все приведенные выше примеры основаны на MCHPFSUSB Framework v1.3. С появлением контроллеров PIC24 и PIC32 с USB OTG, компания Microchip выпустила новую версию стека - USB stack v. 2.х.
В новой версии USB stack v. 2.3, помимо стеков USB device, реализующего функциональность USB-клиента, USB Embedded host, реализующего функциональность хоста, также добывлен стек USB dual role, реализующий функции и хоста, и клиента; и USB OTG, поддерживающий протокол согласования роли хоста (HNP), протокол запроса сеанса (SRP), и полностью соответствующий спецификации USB OTG. В примерах применения реализовано:
- Embedded Host
- Printer Class host - поддержка ESC/POS, PostScript® и PCL5 принтеров
- CDC Class host - поддержка устройств ACM (abstract control model)
- HID Клавиатура
- Device
- HID bootloader - добавлена поддержка семейств PIC32MX460F512L и PIC18F14K50
- HID клавиатура, мышка
- MSD internal flash demo - использование внутренней flash для хранения файлов
- MSD + HID composite example - пример составного устройства MSD и HID
- CDC - эмуляция COM-порта
- поддержка семейства PIC32MX460F512L для всех демонстрационных проектов ПК
- примеры HID, MCHPUSB и WinUSB теперь поддерживают функцию Microsoft Plug-and-Play (PnP) для автоопределения.
- Документация
- полное описание всех API расположено в папке "\Microchip\Help"
Microchip бесплатно предоставляет драйвера наиболее востребованных USB-классов:
- Интерфейс пользователя (HID). Этот режим обмена используется практически во всех клавиатурах, "мышках" и прочих устройствах ввода/вывода
- Коммуникационное устройство (CDC). Этот режим наиболее простой для перехода с последовательного интерфейса RS-232 на USB. На компьютерах с WinXP/2K производиться создание и эмуляция виртуального COM-порта при подключении микроконтроллера. Программы, работающие с портами COM1.. 4 будут работать без изменений и с виртуальным портом, но с большей скоростью (порядка 1 Мбит/с)
- Устройства массового хранения (MSD). Это устройства, работающие как накопители информации - флешки, SD/MMC-карты, диски и прочее
- Устройства класса "принтер" (Printer Class). Этот режим создан для использования USB-принтеров, что позволяет конечному устройству на PIC-микроконтроллере с модулем USB выводить необходимую информацию непосредственно на USB-принтер
- Резидентный загрузчик Microchip. Простейший режим, который используется только для обновления по USB программного обеспечения микроконтроллера. Со стороны ПК устанавливается небольшая программа, аналог драйвера
- Собственный драйвер (Custom). Наиболее полное использование ресурсов USB2.0 для продвинутых пользователей: возможность выбора режимов работы шины (изохронный, по прерываниям, объемный, управления), высокая скорость передачи. Требует глубоких знаний работы шины и навыки разработки ПО под Windows
Бутлоадер с USB Flash Drive
Обновление прошивки с обычного флэш диска.
Для обновления прошивки микроконтроллера с модулем USB-OTG (PIC24 или PIC32) не обязательно использовать специальное программное обеспечение. Наличие Host-режима позволяет подключать к микроконтроллеру обычные USB-накопители данных (Flash Drive). На сайте Microchip опубликован пример (
Для запуска примера вам нужно загрузить прошивку бутлоадера в плату PIC32 USB Board или Explorer 16 (c установленным процессорным модулем PIM PIC32 USB и дочерней платой USB PICtail Plus Daughter Board). Если подать питание на плату при нажатой кнопке, то контроллер перейдет в режим обновления прошивки. Если теперь подключить Flash накопитель с записанным файлом обновления прошивки, то микроконтроллер считает этот файл и перепишет в свою память программ.
Отладочные платы и средства разработки для USB
Программатор-отладчик PICkit2 (номер для заказа PG164120)
Наличие бутлоадера позволяет заливать свое программное обеспечения для освоения навыков работы с USB

Рис. 20
Отладочная плата PICDEM FS-USB (номер для заказа DM163025)
Предназначена для разработок и демонстрации устройств на микроконтроллере PIC18F4550 с шиной USB2.0. На плате установлен контроллер PIC18F4550 в корпусе TQFP44.

Рис. 21
Low Pin Count USB Develpment Kit (номер для заказа DM164127)
Отладочная плата Low Pin Count USB Development Kit предоставляет легкий путь для оценки возможностей микроконтроллеров 20-и выводных USB микроконтроллеров Microchip PIC18F14K50 и PIC18F13K50. Комплект включает все необходимое для начала работы с USB контроллерами (программное обеспечение, исходные файлы примеров, документацию).

Рис. 22
PIC18F87J50 Full Speed USB PIC18F87J50 FS USB Demo Board (номер для заказа MA180021)
Плата PIC18F87J50 FS USB Demo Board служит для отладки Full Speed USB 2.0 микроконтроллеров семейства PIC18F87J50. Помимо автономной работы плата так же может использоваться как процессорный модуль для платы PIC18 Explorer Board.

Рис. 23
Комплект разработчика PIC24F Starter Kit содержит все необходимое для начала работы с высокопроизводительными контроллерами семейства PIC24F. Этот недорогой комплект содержит интегрированный внутрисхемный отладчик и программатор, контроллер PIC24F с интерфейсом USB (на плате могут быть реализованы функции Host и Device), трехцветный светодиод, емкостная сенсорная панель и графический OLED дисплей. Демонстрационная программа через графическое меню позволяет осуществлять запись данных на внешний USB Flash Drive, осуществлять настройку сенсорной панели и запускать графические задачи.

Рис. 24
PIC32 USB Board (номер для заказа DM320003)
Позволяет освоить модуль USB-OTG в контроллерах PIC32

Рис. 25
Отладочная плата "Explorer 16 Development Board" (номер для заказа DM240001)
Это дешевое средство отладки для ознакомления и начала работы с высокопроизводительными семействами 16-и разрядных микроконтроллеров PIC24 и контроллерами цифровой обработки сигналов dsPIC33F.

Рис. 26
Дочерняя плата "USB PICtali Plus " (номер для заказа AC164131)
Совместно с USB процессорными Plug-In модулями позволяет разрабатывать и отлаживать USB устройства Host, Device, USB-OTG.

Рис. 27
Илья Афанасьев ,
Компания
Программирование через порт USB
Программирование прибора для настройки спутниковых антенн SF-50 через порт USB отличается от программирования через порт RS-232 только способом передачи данных с прибора на компьютер и с компьютера на прибор. При программировании через USB задействуется портативный USB накопитель (флешка). Это удобно когда, например, ваш компьютер или, чаще, ноутбук (нетбук) не имеет на своем шасси последовательного RS-232 порта.
Для программирования прибора с использованием USB накопителя понадобятся:
- USB накопитель (флешка), отформатированная в файловую систему FAT-32;
- программа-редактор AliEditor, находится в папке Database_editor_new раздела софт прибора OPENBOX SF-50.
Перед началом программирования необходимо базу данных с прибора перенести на компьютер. Для этого включить прибор, подключить к порту USB флешку. Выполнить MENU – Система – Сохранить на USB,

Выйти из меню нажатием кнопки MENU до появления текущего канала, или до картинки главного меню, если каналы пока отсутствуют и извлечь флешку. Вставить флешку в компьютер.
Запустить программу Editor.exe из папки Database_editor_new и открыть в ней имидж на флешке.

На запрос о выборе базы данных выбрать User Data Base.

Нажать ОК. Выбрать All Services, откроется список всех имеющихся в базе просканированных и сохраненных теле, радио и сервисных каналов.

Отредактировать каналы по своему усмотрению, например, оставить только открытые каналы.
На клавиатуре компьютера зажать кнопку Shift, нажать «Стрелка вниз» и выделить каналы, которые нужно удалить. Нажажать Delete для удаления выбранного.

Для редактирования параметров настройки на спутник, выбрать All Services – Satellite Information – EUTELSAT W4, W7, нажать кнопку ENTER.

При необходимости отредактировать значения в Antenna 1.
Для удаления транспондера встать на ненужный и нажать кнопку Delete на клавиатуре компьютера, подтвердить выбранное действие.

Для добавления транспондера встать на название спутника, нажать правую кнопку мыши и выбрать Add Information (или выделив спутник нажать кнопку Insert на клавиатуре).

Ввести данные по новому транспондеру, взяв их, например, на сайте lyngsat.com.


Нажать ОК, убедиться, что транспондер прописался.

Для добавления спутника, встать на строку Satellite Information, нажать клавишу Insert на клавиатуре и ввести параметры нового спутника.


закрыть программу-редактор, извлечь накопитель.
Вставить накопитель в прибор OPENBOX SF-50, выполнить последовательно MENU – Система – Обновление с USB, выбрать режим «Список SAT&TP».

Выбрать Начать. Подтвердить свои намерения.

Прибор обновит базу и самостоятельно перезагрузится. После перезагрузки в настройках придется по-новому установить русский язык меню. Сбросить прибор в заводские настройки.
Выйти из меню настроек, два раза нажав кнопку MENU. Нажать кнопку ОК на текущем канале и убедиться, что список каналов отредактирован.

Также можно убедиться, что отредактирован и список транспондеров и спутников.
Программирование закончено.